A tecnologia tem avançado a passos largos, e um dos campos que mais tem atraído a atenção de entusiastas e profissionais é a robótica. Dentro deste universo, o robô de evasão de obstáculos e resolução de labirintos baseado em Arduino surge como uma excelente forma de aplicar conceitos de programação e eletrônica, além de proporcionar uma experiência prática de desenvolvimento. A princípio, o uso do Arduino, uma plataforma de prototipagem eletrônica de código aberto, facilita a criação de projetos inovadores com baixo custo e grande potencial de aprendizado.
Neste artigo, vamos explorar como desenvolver um robô de evasão de obstáculos e resolução de labirintos baseado em Arduino, passando pelos componentes necessários, a programação do robô, os desafios envolvidos e as diversas aplicações dessa tecnologia. Se você é um entusiasta de robótica ou está apenas começando, esse projeto pode ser uma excelente oportunidade para colocar a mão na massa e aprender de maneira divertida.
O que é um robô de evasão de obstáculos e resolução de labirintos?
Antes de mais nada, é importante entender o conceito básico de um robô de evasão de obstáculos e resolução de labirintos baseado em Arduino. Esse tipo de robô tem a capacidade de navegar por um ambiente, detectar obstáculos e evitá-los, ao mesmo tempo em que é capaz de percorrer um labirinto ou caminho desconhecido.
O objetivo principal é desenvolver um sistema de navegação autônomo, onde o robô utiliza sensores para identificar o que está à sua frente e decide qual direção seguir, evitando colisões. Além disso, no caso de um labirinto, o robô precisa usar algoritmos específicos para encontrar a solução, ou seja, o caminho mais curto até a saída.
Por que usar Arduino?
Primeiramente, o Arduino é uma plataforma acessível e amplamente utilizada na construção de robôs devido à sua simplicidade e flexibilidade. Ele permite que você conecte diversos tipos de sensores e atuadores, e sua programação é feita em uma linguagem fácil de aprender. A principal vantagem de usar o Arduino é a possibilidade de experimentar e modificar seu código de maneira prática e rápida, o que é perfeito para quem está começando a entender os conceitos de robótica.
Componentes essenciais para o robô de evasão de obstáculos
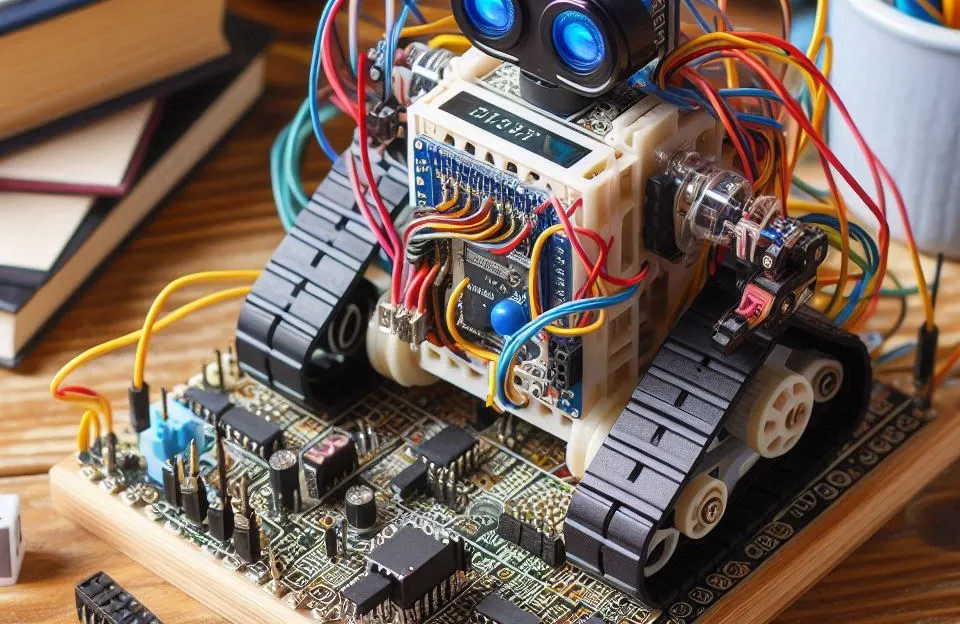
Antes de iniciar o projeto, é fundamental entender os componentes necessários para montar o seu robô de evasão de obstáculos e resolução de labirintos baseado em Arduino. Abaixo, listamos os principais itens que você vai precisar:
- Placa Arduino: A base do robô, onde será carregado o código para controle.
- Sensores de distância (ultrassônicos): Para detectar obstáculos e medir distâncias.
- Motores de corrente contínua (DC): Responsáveis pelo movimento do robô.
- Driver de motor (L298N): Para controlar a velocidade e direção dos motores.
- Rodinhas e chassi: Para garantir a mobilidade do robô.
- Fios e protoboard: Para realizar as conexões elétricas.
Além disso, para a resolução do labirinto, você pode adicionar outros sensores, como o sensor de linha ou câmeras, dependendo do nível de complexidade do projeto.
Montagem do robô de evasão de obstáculos
Acima de tudo, a montagem do robô de evasão de obstáculos é a parte mais prática do projeto, mas que exige atenção aos detalhes. Comece conectando os motores ao chassi do robô. Em seguida, fixe os sensores de distância na frente do robô, para que ele possa detectar obstáculos à sua frente.
Em primeiro lugar, a conexão do Arduino aos motores é feita por meio do driver L298N, que permite controlar a direção e a velocidade dos motores. O driver L298N recebe comandos do Arduino e, por sua vez, envia a corrente necessária para os motores.
Programação do robô de evasão de obstáculos
Agora que o hardware está montado, é hora de programar o robô de evasão de obstáculos e resolução de labirintos baseado em Arduino. A programação é uma das etapas mais emocionantes e desafiadoras do projeto, pois é onde o robô começa a “ganhar vida”. O objetivo da programação é fazer com que o robô identifique os obstáculos, calcule a melhor direção a seguir e realize a navegação de forma autônoma.
Código básico para evasão de obstáculos
A princípio, o código do robô de evasão de obstáculos pode ser simples. Ele precisa ler os dados dos sensores de distância e, com base na proximidade de um obstáculo, decidir qual ação tomar. Por exemplo:
- Se o obstáculo estiver muito próximo, o robô deve parar ou virar.
- Se não houver obstáculos, ele pode seguir em frente.
Esse tipo de lógica é implementado com base na leitura dos sensores ultrassônicos, que medem a distância entre o robô e os objetos à sua frente.
cppCopiar código<span class="hljs-comment" data-uipath_custom_id_23_4_59_15687="503">// Código simplificado de evasão de obstáculos</span>
<span class="hljs-meta" data-uipath_custom_id_23_4_59_15687="504">#<span class="hljs-keyword" data-uipath_custom_id_23_4_59_15687="505">include</span> <span class="hljs-string" data-uipath_custom_id_23_4_59_15687="506"><AFMotor.h></span> <span class="hljs-comment" data-uipath_custom_id_23_4_59_15687="507">// Biblioteca para controle de motores</span></span>
<span class="hljs-type" data-uipath_custom_id_23_4_59_15687="508">long</span> distancia = <span class="hljs-number" data-uipath_custom_id_23_4_59_15687="509">0</span>;
<span class="hljs-type" data-uipath_custom_id_23_4_59_15687="510">int</span> triggerPin = <span class="hljs-number" data-uipath_custom_id_23_4_59_15687="511">9</span>;
<span class="hljs-type" data-uipath_custom_id_23_4_59_15687="512">int</span> echoPin = <span class="hljs-number" data-uipath_custom_id_23_4_59_15687="513">10</span>;
<span class="hljs-function" data-uipath_custom_id_23_4_59_15687="514"><span class="hljs-type" data-uipath_custom_id_23_4_59_15687="515">void</span> <span class="hljs-title" data-uipath_custom_id_23_4_59_15687="516">setup</span><span class="hljs-params" data-uipath_custom_id_23_4_59_15687="517">()</span> </span>{
<span class="hljs-built_in" data-uipath_custom_id_23_4_59_15687="518">pinMode</span>(triggerPin, OUTPUT);
<span class="hljs-built_in" data-uipath_custom_id_23_4_59_15687="519">pinMode</span>(echoPin, INPUT);
Serial.<span class="hljs-built_in" data-uipath_custom_id_23_4_59_15687="520">begin</span>(<span class="hljs-number" data-uipath_custom_id_23_4_59_15687="521">9600</span>);
}
<span class="hljs-function" data-uipath_custom_id_23_4_59_15687="522"><span class="hljs-type" data-uipath_custom_id_23_4_59_15687="523">void</span> <span class="hljs-title" data-uipath_custom_id_23_4_59_15687="524">loop</span><span class="hljs-params" data-uipath_custom_id_23_4_59_15687="525">()</span> </span>{
distancia = <span class="hljs-built_in" data-uipath_custom_id_23_4_59_15687="526">getDistancia</span>();
<span class="hljs-keyword" data-uipath_custom_id_23_4_59_15687="527">if</span>(distancia < <span class="hljs-number" data-uipath_custom_id_23_4_59_15687="528">15</span>) {
<span class="hljs-comment" data-uipath_custom_id_23_4_59_15687="529">// Obstáculo muito próximo, vira</span>
<span class="hljs-comment" data-uipath_custom_id_23_4_59_15687="530">// Código para virar</span>
} <span class="hljs-keyword" data-uipath_custom_id_23_4_59_15687="531">else</span> {
<span class="hljs-comment" data-uipath_custom_id_23_4_59_15687="532">// Não há obstáculos, segue em frente</span>
<span class="hljs-comment" data-uipath_custom_id_23_4_59_15687="533">// Código para andar para frente</span>
}
}
<span class="hljs-type" data-uipath_custom_id_23_4_59_15687="534">long</span> <span class="hljs-built_in" data-uipath_custom_id_23_4_59_15687="535">getDistancia</span>() {
<span class="hljs-built_in" data-uipath_custom_id_23_4_59_15687="536">digitalWrite</span>(triggerPin, LOW);
<span class="hljs-built_in" data-uipath_custom_id_23_4_59_15687="537">delayMicroseconds</span>(<span class="hljs-number" data-uipath_custom_id_23_4_59_15687="538">2</span>);
<span class="hljs-built_in" data-uipath_custom_id_23_4_59_15687="539">digitalWrite</span>(triggerPin, HIGH);
<span class="hljs-built_in" data-uipath_custom_id_23_4_59_15687="540">delayMicroseconds</span>(<span class="hljs-number" data-uipath_custom_id_23_4_59_15687="541">10</span>);
<span class="hljs-built_in" data-uipath_custom_id_23_4_59_15687="542">digitalWrite</span>(triggerPin, LOW);
<span class="hljs-keyword" data-uipath_custom_id_23_4_59_15687="543">return</span> <span class="hljs-built_in" data-uipath_custom_id_23_4_59_15687="544">pulseIn</span>(echoPin, HIGH) * <span class="hljs-number" data-uipath_custom_id_23_4_59_15687="545">0.034</span> / <span class="hljs-number" data-uipath_custom_id_23_4_59_15687="546">2</span>;
}
Esse código básico já permite que o robô evite obstáculos de forma simples. No entanto, o que torna esse projeto ainda mais interessante é a possibilidade de implementar algoritmos de resolução de labirintos, como o algoritmo de busca em profundidade (DFS) ou o algoritmo de busca em largura (BFS), que são mais avançados e eficientes para encontrar a solução do labirinto.
Resolução de labirintos com o Arduino
Sobretudo, a resolução de labirintos é uma das partes mais fascinantes do projeto. O robô de evasão de obstáculos e resolução de labirintos baseado em Arduino pode ser programado para seguir estratégias de exploração para resolver labirintos. O algoritmo de resolução pode ser baseado em um sistema de navegação que permita ao robô analisar o ambiente e tomar decisões baseadas em sensores.
Estratégias para resolver labirintos
Existem várias abordagens para resolver um labirinto com um robô. A mais comum é a estratégia do “mão direita”, onde o robô mantém uma das mãos (ou sensores) sempre na parede e segue esse caminho até encontrar a saída. Contudo, existem algoritmos mais avançados, como:
- Busca em profundidade (DFS): Explora o labirinto em profundidade, indo até onde for possível e, caso encontre um beco sem saída, retorna e tenta outra direção.
- Busca em largura (BFS): Explora o labirinto por níveis, garantindo que o robô encontre a solução mais rápida.
Esses algoritmos podem ser implementados com sensores de parede ou de linha, permitindo que o robô “veja” e interprete o caminho à sua frente, de acordo com os dados recebidos.
Testando e ajustando o robô
Do mesmo modo que a montagem e a programação, o processo de teste do robô é crucial para garantir seu funcionamento correto. Além disso, como os sensores podem ter pequenas variações de precisão, é importante ajustar a programação e os componentes para otimizar o desempenho.
Minhas Impressões Pessoais
Pessoalmente, acho fascinante como o robô de evasão de obstáculos e resolução de labirintos baseado em Arduino combina teoria e prática de maneira tão eficiente. O projeto oferece uma ótima oportunidade de aprender sobre eletrônica, programação e robótica, além de ser altamente personalizável. A sensação de ver o robô navegar autonomamente por um labirinto ou evitar obstáculos de forma inteligente é bastante gratificante. Além disso, as possibilidades de expansão, como adicionar sensores adicionais ou melhorar a lógica de navegação, tornam o projeto ainda mais desafiador e interessante.
Conclusão
Portanto, o robô de evasão de obstáculos e resolução de labirintos baseado em Arduino não é apenas um excelente projeto para quem deseja aprender sobre robótica, mas também uma maneira prática e divertida de aplicar conhecimentos de eletrônica e programação. Através de uma combinação de sensores, motores e código, é possível criar um robô autônomo capaz de explorar e resolver problemas de navegação de forma eficiente. E, o melhor de tudo, esse tipo de projeto pode ser facilmente adaptado e expandido, oferecendo muitas oportunidades para aprimorar as habilidades em robótica.
Perguntas Frequentes (FAQ)
É um robô que navega sozinho, detecta obstáculos e evita colisões. Além disso, ele pode percorrer labirintos usando algoritmos para encontrar o caminho mais rápido até a saída.
O Arduino é barato, fácil de programar e permite conectar vários sensores e atuadores, tornando-o perfeito para iniciantes em robótica.
Você vai precisar de uma placa Arduino, sensores de distância, motores DC, driver de motor, rodas, chassi, fios e protoboard.